Quick Start
This is the quick start example to get started with the RAS. RAS is an open source platform, which provides tools and functionality to control the robot. To quickly start with the experiment, you can follow this guide.
After the installation of RAS, initialize the server application by running the following command:
ras server init
ras server init will first pull application specific repositories which are defined in the repos/apps/ras_server_lab.repos, then pull it’s dependencies, and after that, pull docker image for the server application.
Note
-i argument is defined to pull the latest docker image and doesn’t require if you want to use the existing docker image.
ras server build
The above command will build the ros2 packages for the server application in apps/ras_server_lab/ros2_ws directory.
(Optional) If you need build the docker image, then use –force argument with command:
Start the server app by running the following command:
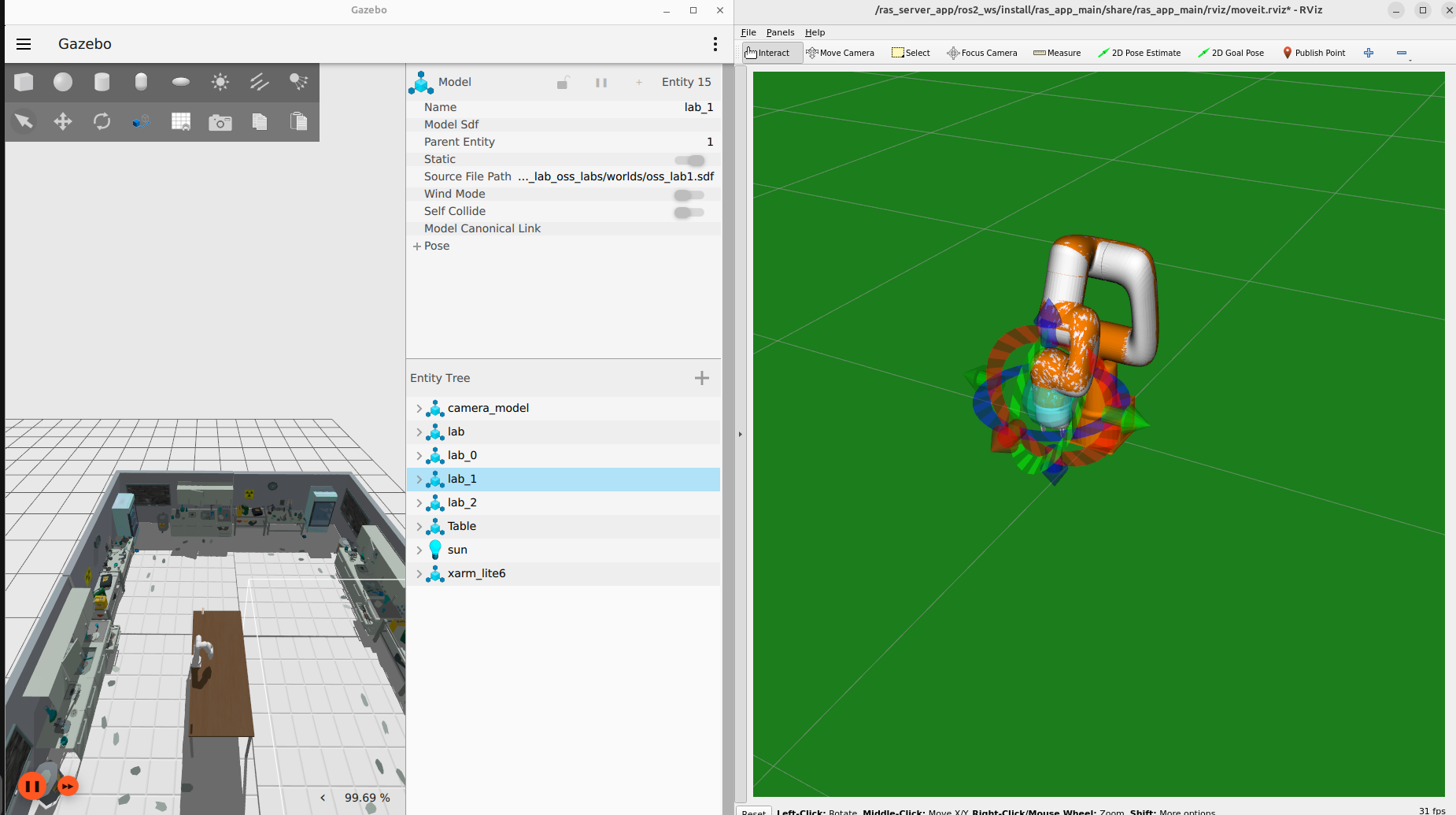
ras server run

It will start the Gazebo Sim with XArm Robot, Rviz2, and other necessary components for the application to work out-of-the-box. You can now interact with robot.
To start the experiment, open the terminal and go to the debugging panel. Now run the following commands:
ras_cli -h
First, we need to load the specific experiment to run. These experiment files are defined in the config/experiments directory under ras_sim_lab. You can select any experiment to run from the provided. For this example, we use the experiment 0:
ras_cli load_experiment 0
This will load the experiment file 0.
Next step is to start the experiment. For that run the following command:
ras_cli run_sim
This will start the simulation, and you can see the robot arm performing the motion pick and place in the simulation. You should wait for the experiment to complete and then continue with the next steps.
Note
Based on the experiment file, the behavior tree is generated to perform the actions defined in the YAML file. Then the robot arm will perform the motion in the simulation. Let’s consider these target actions:
Poses:
out1: {x: 0.2, y: 0, z: 0.5, roll: 3.14, pitch: 0, yaw: 0}
above1: {x: 0.2, y: -0.35, z: 0.33, roll: 3.14, pitch: 0, yaw: -1.575}
in1: {x: 0.2, y: -0.35, z: 0.25, roll: 3.14, pitch: 0, yaw: -1.575}
out2: {x: 0.2, y: 0, z: 0.5, roll: 3.14, pitch: 0, yaw: -1.575}
above2: {x: 0.40, y: 0.0, z: 0.37, roll: 3.14, pitch: 0, yaw: -1.575}
in2: {x: 0.40, y: 0.0, z: 0.33, roll: 3.14, pitch: 0, yaw: -1.575}
targets:
- move2pose: out1
- move2pose: above1
- move2pose: in1
- gripper: true
- move2pose: above1
- move2pose: out2
- move2pose: above2
- move2pose: in2
- gripper: false
- move2pose: above2
- move2pose: out2
First, the XArm robot will move to the out1 pose, which is defined as x position of gripper of robot arm is 0.2 m w.r.t. base of the robot and z is 0.5 m and roll of gripper will be 3.14, then to the above1 pose, where the robot moves to y -0.35 m and z 0.33 m, and then to the in1 pose, where gripper reaches z 0.25. After that, the gripper will be closed. Then the robot will move to the above1 pose based on the pose, then to the out2 pose, then to the above2 pose, and then to the in2 pose. Finally, the gripper will be opened.
After the experiment is completed, now this is the time to run the experiment in the robot. For that, you need to install and build the robot app with the RAS. For this quick start, we will use robot simulation using another Gazebo Sim with robot arm. Now the run following command to start the robot simulation:
ras robot init
This will pull application specific repositories which are defined in the repos/apps/ras_robot_lab.repos, then pull it’s dependencies, and after that, pull docker image for the robot application.
Note
-i argument is defined to pull the latest docker image and doesn’t require if you want to use the existing docker image.
Build the ros2 packages for the robot application by running the following command:
ras robot build
The above command will build the ros2 packages for the robot application in apps/ras_robot_lab/ros2_ws directory.
(Optional) If you need to build the docker image, then use –force argument with command:
ras robot build --force
Start the robot app by running the following command:
ras robot run sim
It will start the Gazebo Sim with XArm Robot, Rviz2, and other necessary components for the application to work out-of-the-box. You can now also interact with robot.
To start the experiment, use the same terminal described in step 4. Now run the following commands:
ras_cli run_real
This will send the behavior tree generated by sim app to robot app, and robot app will perform the trajectory. You can now see the robot arm performing same motion pick and place in the robot simulation. Also, the robot and simulation robot are synchronized to perform the same motion.
This is all for the quick start guide. You can now explore more features and functionalities of RAS by going through the documentation.
Run the experiment using ros2 cli for developers
You can also run the experiment using the ros2 cli. For that, you need to follow the following steps:
In order to load the experiment, run the following command:
ros2 service call /get_exepriment ras_interfaces/srv/LoadExp "{exepriment_id: 0, instruction_no: '', picked_object: ''}"
This will load the experiment file 0.
Next step is to start the experiment. For that run the following command:
ros2 service call /test_experiment std_srvs/srv/SetBool "data: false"
This will start the simulation, and you can see the robot arm performing the motion pick and place in the simulation.
After the experiment is completed, now this is the time to run the experiment in the real robot. For that, you need to connect the real robot with the RAS. But for this quick start we will simulate another Gazebo Sim with robot arm to pretend it as real robot. Now the run following command to start the real robot simulation:
ros2 action send_goal /execute_exp ras_interfaces/action/ExecuteExp {}
This will send the behavior tree generated by sim app to real app, and real app will perform the trajectory. You can now see the robot arm performing same motion pick and place in the real simulation. Also, the real and simulation robot are synchronized to perform the same motion.